USS
Asheville
|
|
| As the mission area of the Submarine Force
expands to embrace the shallow water littorals, the advantages of using high frequency
(HF) sonar in tactical operations as an adjunct to more traditional medium frequency
systems are becoming more apparent. The high range and bearing resolution that can be
achieved with active HF sonar makes possible many new capabilities that are essential to
success in shallow water operations of all kinds. USS Asheville (SSN-758) has been a
pioneer in demonstrating the value of HF sonar ever since she was selected as the
operational test platform for the High Frequency Sonar Program (HFSP), and had her basic
HF system installed in March 1995. High
Frequency Sonar – Tailored for Shallow Water The faster absorption of high frequency sound does not permit the long passive detection ranges of lower frequency systems in deep water. However, in shallow water, passive detection ranges are often limited by environmental noise and adverse propagation – rather than absorption. In these noise-limited environments, the narrow beamwidths achievable in HF passive surveillance modes allow excellent discrimination between multiple contacts and biologics, which is key to success under littoral conditions.
With Asheville in drydock,
the chin receiver and
The Advanced Development Model (ADM) arrays on Asheville comprise both projector and receiver arrays on chin and sail. Each array provides a specific aperture characteristic to support multiple missions. The large horizontal aperture of the chin receiving array generates very narrow beams in azimuth for significant reverberation rejection and improved shallow water performance. Thus, the chin array is ideal for active mine and ASW detection, and its passive capabilities have opened up new operational possibilities. The chin projector can ensonify the region below the submarine without interference from the bow, and the low position of the chin arrays on the hull enables them to be operated with the boat at or near the water surface. The large vertical aperture of the sail receiver array yields narrow beamwidths in elevation, again reducing multi-path reverberation and suiting it well for detecting ASW and mine targets – especially when the latter are close tethered – plus seafloor and canopy profiling and under-ice navigation. The location of the sail arrays also allows them to provide unobstructed obstacle avoidance for the submarine during surfacing and under-ice operations. COTS: Rapid Development of New
Capabilities
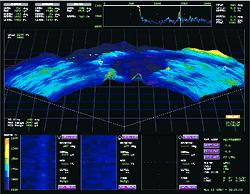
A 3-D perspective view
of a volcano crater off the As a demonstration of the flexibility inherent in the modular approach, a key change was made during the initial at-sea testing, when Sonarmen on-board Asheville suggested creating a High Frequency Passive Broadband (HFPBB) function to supplement the existing active features. Most Sailors are familiar with the time and effort involved in developing and installing major changes to conventional hardware systems. Entire banks of equipment are removed or gutted, new gear is installed by the vendor, and installation times are often measured in weeks. Taking advantage of the modularity of Asheville’s COTS HF system, HFPBB was developed, installed, and tested over a three-day period. "It was incredible," said STSCS(SS) Donald Jernigan, the LPO at the time of the install. "These software engineers thought about it for a minute and said, ‘Yeah, we think that’s doable.’ Next thing we knew, we had the only HFPBB system in the fleet!"
A sailor operates the HFSP
system display, which In Asheville’s case, the upgrades were performed by an Engineering Change Team, consisting of one technician and two programmers. This small-team concept is key to operational flexibility, since it allows modifications and corrections to be made anywhere in the world. The teams can fly to the ship’s current location with parts and software (a new pre-programmed hard drive or CD-ROM for on-board loading) and get right to work. Installation and testing usually take less than two days. "Maintaining this COTS hardware and unique software presents a lot of challenges," said STS3(SS) Neal Bedersen, Asheville’s HFSP expert, "but with the support we get from NUWC and ARL, and their ability to deliver software and hardware support, it’s been great. And the capability gained is phenomenal!" For minor system updates, ship’s force Sonarmen can download changes straight to the system’s hard drive from a floppy disk mailed to the ship. In the future, major research and development upgrades could well be installed remotely via modem and secure phone lines. At Sea Testing
An electronic
technician works on the The second phase of the testing was conducted in deep water to determine the active and passive ASW performance of both arrays. Active detection ranges were achieved out to the limits predicted for the environment. In addition, notable passive detection ranges were seen using the chin array. Since real sea ice was in short supply near Hawaii, the target ship for the exercise was also positioned to simulate an ice keel for verifying the under-ice performance of the sail array in that scenario. Operational Experience In the ASW mode, HF active not only detects and tracks actual targets, but also occasionally detects wakes from surface ships and submarines. These wake detections provide not only contact bearing and range, but also an excellent indication of course and speed, all in one ping. Many of the modes use transmissions that are designed to be undetectable to modern acoustic intercept devices, thus maintaining the boat’s inherent stealth while yet improving her sonar capabilities. "ASW is still our meat-and-potatoes mission, and in shallow water against a quiet contact, HFSP has given us the edge," says LT Jack Shriver, Asheville’s Combat Systems Officer. "Passive or active, one whiff on HFSP and he’s a sitting duck." The profiling mode uses the active reverberation from seafloor features to "paint" a three-dimensional map of the bottom contour ahead of the ship, a feature Asheville first demonstrated during her 1996 WESTPAC deployment. During the 1998 deployment, while operating in poorly charted, extremely shallow waters, Asheville used this real-time data extensively for navigation safety. "Using profile mode is like flying on a clear day, instead of having to use instruments," according to ETC(SS) Larry Wood, Asheville’s Assistant Navigator. "You can see exactly what you’re getting yourself into. Of course, I’ll still hang on to my trusty fathometer, but I can see the wave of the future for littoral navigation." Another rapid turnaround COTS development was a real-time recording system to log profiling data. Developed at the ship’s request just weeks before the 1998 WESTPAC deployment, the recorder electronically tags bottom features with on-board navigation data, so the observations can be used for correcting charts. Future HF work The addition of a Precision Underwater Mapping (PUMA) capability will be provided as a future upgrade through the Advanced Processing Build (APB) framework. The PUMA algorithms rely on high precision, sonar-derived navigation, accurate profiling, and advanced CAD algorithms to generate high-resolution terrain and target maps of the seafloor in real time. The APB will deliver improvements to both active and passive ASW capabilities as well, with Initial Operational Capability currently scheduled for 2002. Conclusions |