Long Range Biological Standoff Detection System (LR-BSDS)
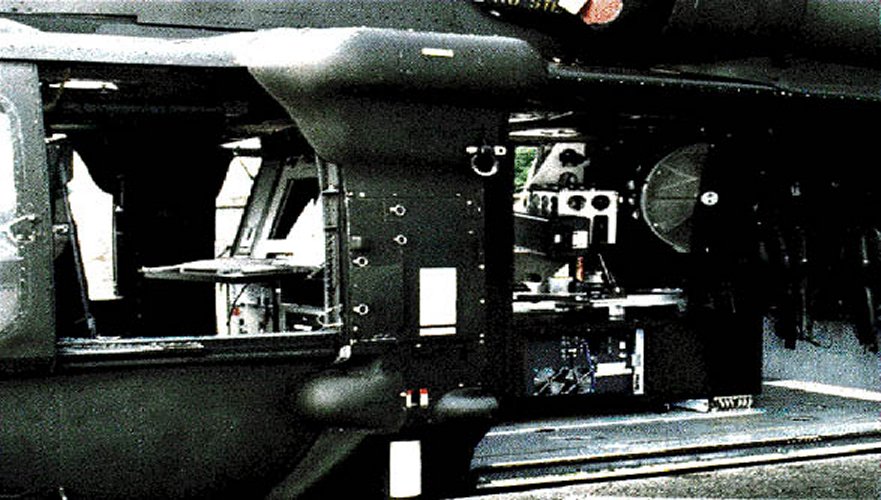
The Long Range Biological Standoff Detection System (LR-BSDS) is used to detect, track and map large area aerosol clouds. The Program strategy is to develop an interim capability, the Non-Developmental Item (NDI) system and an objective capability, the Counterproliferation (CP) system. Both the NDI and CP systems are mounted and operated from an unmodified UH-60 Blackhawk helicopter platform.
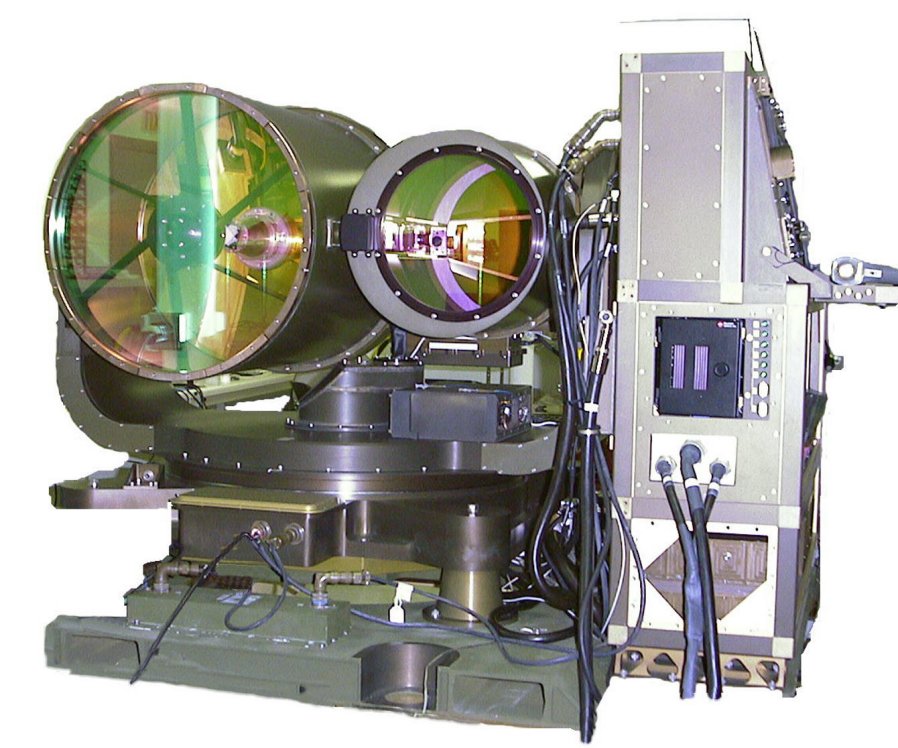
The CP LR-BSDS system has three major components:
- A 100Hz operationally eye-safe laser transmitter
- A 24-inch receiving telescope
- A Transferred Electron-Intensified Photo Diode detector with an information processor integrated into a frame
Both systems employ Light Detection and Ranging (LIDAR) laser technology and will detect and track aerosol clouds (with particles larger than 1 micron) at ranges up to 30km (50km for the objective system). Both the CP and the NDI LR-BSDS systems will provide information about the cloud configuration (size, shape, and relative intensity) and cloud location (range, width, height, height above ground and drift rate).
The CP system will also provide a computer generated discrimination between man-made and naturally occurring aerosol clouds. Both systems use power provided by the UH-60 helicopter platform and are capable of being installed/removed from the helicopter in 30 minutes. The CP LR-BSDS uses one operator and has a stabilized platform to compensate for the yaw, pitch, and roll of the helicopter. The interim system, type classified limited procurement in June 1995 as the XM94, has been fielded and uses similar technology to allow a two operator crew for human discrimination between man-made and naturally occurring aerosol clouds.
The LR-BSDS is a corps level asset which provides early warning and aerosol cloud information to enhance contamination avoidance efforts and cue other biological detection assets (e.g. the BIDS). Detection information from the LR-BSDS will be analyzed with other battlefield information and intelligence data to determine appropriate defensive measures.




Sources and Resources
http://www.fas.org/man/dod-101/sys/land/lr-bsds.htm
Maintained by Robert Sherman
Originally created by John Pike
Updated Thursday, March 09, 2000 6:18:02 AM